struct2depthとは、Google Brainが開発した、単眼カメラから深度とエゴモーション(カメラ自身の動き)を推定する手法です。
仮想環境(VirtualBox)を使ってまっさらの環境から動くところまでです。
環境
OS: Ubuntu18.04LTS
Python 2.7.17
Tensorflow 1.12.0
Opencv 4.4.0-pre
まず以下の順番で必要なライブラリをインストールしていきます。
sudo apt install python-pip
pip install --upgrade pip
pip install absl-py
pip install numpy
pip install tensorflow==1.12.0
pip install matplotlibつぎにgithubからstruct2depthをcloneします。
tensorflow/models: Models and examples built with TensorFlow
git clone https://github.com/tensorflow/models.git
struct2depthはresearch/struct2depthにあります。
そのディレクトリに、inputとoutputというディレクトリを作る。
学習済みのモデルをダウンロードする。
KITTIで学習したモデル
struct2depth_model_kitti.tar.gz – Google ドライブ
Cityscapesで学習したモデル
struct2depth_model_cityscapes.tar.gz – Google ドライブ
これらのモデルはmodelディレクトリに格納します。

inputディレクトリにgoogleストリートビューで拾ってきた適当な画像を格納します。
なお、対応拡張子はpngです。
inputの中には階層分けされたデータセットを入れても、正常に処理されます。
ここまでできたら推論の開始、struct2depthのルートに戻って以下のコマンドを実行します。
この場合KITTIのモデルを使用しています。
python inference.py --logtostderr --file_extension png --depth --egomotion true --input_dir input --output_dir output --model_ckpt model/model-199160
ここで、自分の環境では実行時に下記のエラーが発生しました。
locale.Error: unsupported locale setting
です。
これを解決するための情報はこちらにありました。
fixed script relative link by bigsnarfdude · Pull Request #58 · tensorflow/models
Changing line 236 in util.py
locale.setlocale(locale.LC_ALL, ‘en_US’) to locale.setlocale(locale.LC_ALL, ‘en_US.UTF-8’)
solves the problem for me.
書かれている通り、struct2depth/util.pyのlocale.setlocale(locale.LC_ALL, ‘en_US’)を変更しましょう。
locale.setlocale(locale.LC_ALL, 'en_US')
locale.setlocale(locale.LC_ALL, 'en_US.UTF-8')
気を取り直してもう一度推論の開始。
python inference.py --logtostderr --file_extension png --depth --egomotion true --input_dir input --output_dir output --model_ckpt model/model-199160
無事、解析が終わりました。
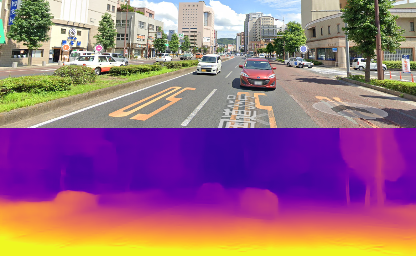

結構距離の推測ができている感じです。
主に下記URLの情報を参考にさせていただきました。
非常に助かりました。ありがとうございます。
struct2depth(距離推定)を動かしてみた – ハードウェア技術者のスキルアップ日誌